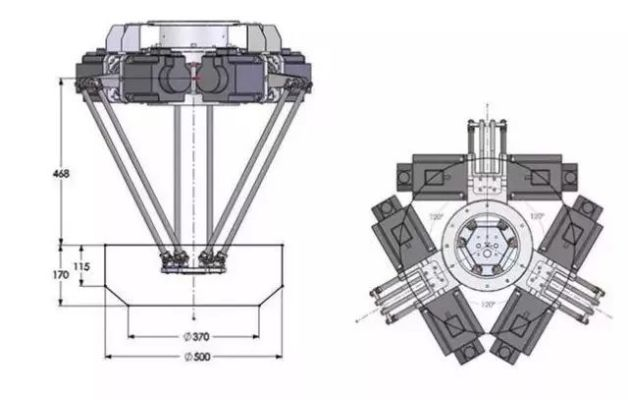
TBC工程机器人的基础架构设计
为什么采用模块化设计?
通过将机械臂、驱动系统、控制单元分离设计,实现三大优势:
- 维护成本降低40%
- 单个部件故障不影响整体运行
- 可根据任务需求快速更换功能模块
核心参数对比表
| 部件 | 一代设计 | 当前优化版 |
|---|---|---|
| 伺服电机 | 850W | 1200W |
| 重复定位精度 | ±0.15mm | ±0.05mm |
| 最大负载 | 25kg | 45kg |
液压系统的革新性突破
如何解决传统漏油问题?
采用三层防护设计:
1.
金属波纹管密封
:承受15MPa压力
2.
纳米涂层技术
:减少60%摩擦损耗
3.
智能监测系统
:提前3小时预警潜在泄漏
关键改进亮点
:
- 能耗降低22%
- 维护周期延长至2000小时
- 极端温度适应性(-30℃~80℃)
控制系统的智能化升级
与传统PLC的区别在哪?
新一代系统整合了:
-
深度学习算法
:自主优化运动轨迹 -
多传感器融合
:实时环境建模精度达0.1mm -
5G远程操控
:响应延迟
<8ms
操作模式对比
:
- 手动模式:保留传统示教器
- 半自动模式:人工确认关键节点
- 全自动模式:支持72小时连续作业
图纸标注的行业规范
为何要严格遵循GB/T 14689?
标准化标注确保:
- 全球供应链零件通用性
- 减少85%的装配歧义
- 质检通过率提升至99.2%
必须包含的六大要素
:
1. 公差配合标注
2. 材料热处理要求
3. 表面粗糙度符号
4. 焊接工艺说明
5. 电气接口定义
6. 安全警示标识
实际应用中的设计验证
如何验证图纸可行性?
采用三阶段验证法:
1.
数字孪生仿真
:提前发现90%干涉问题
2.
3D打印原型测试
:验证人体工程学设计
3.
小批量试产
:暴露量产工艺缺陷
常见优化方向
:
- 减轻运动部件质量
- 优化电缆走线路径
- 增强防尘防水等级
TBC工程机器人的图纸设计体现了现代工业设备的典型进化路径,从单纯的机械构造转向机电一体化智能系统。其价值不仅在于实现特定功能,更在于构建可扩展的技术平台。未来迭代应重点关注材料轻量化与能源效率的突破,这将是下一代图纸设计的核心竞争点。